
Architecture
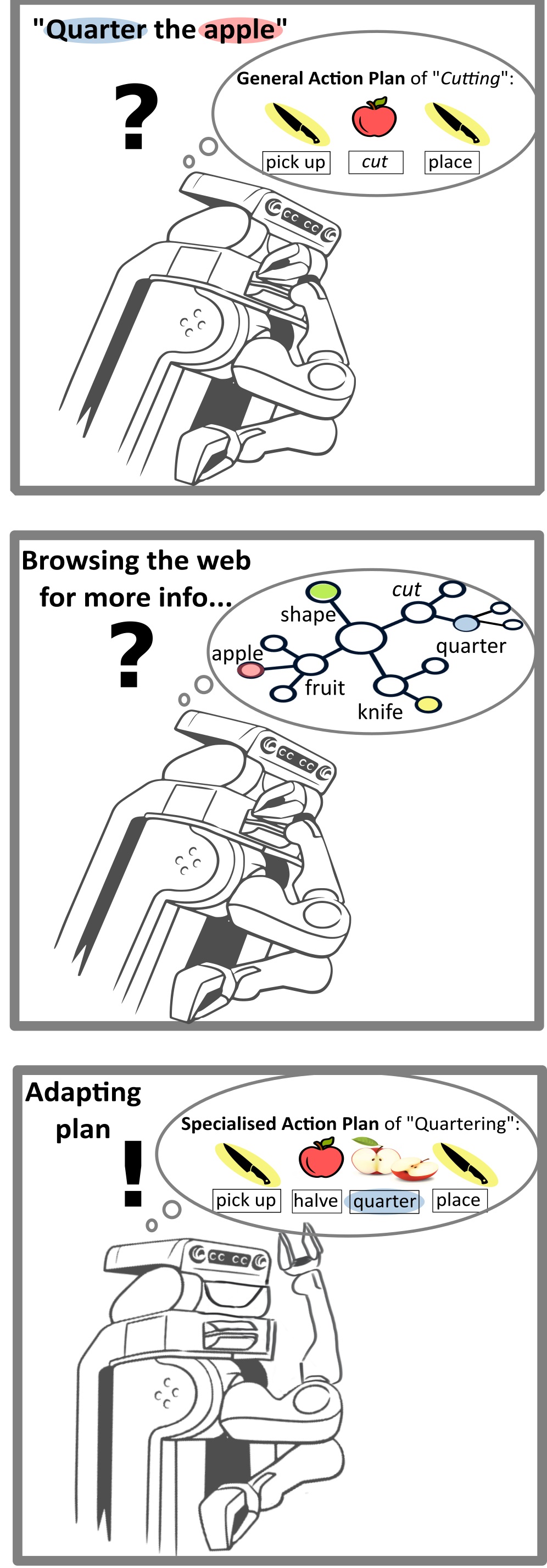
Action Execution To achieve our goal of enabling a robotic agent to handle unkown task variations by parameterising general action plans using web knowledge, we employ the following architecture: In general, the robot needs to have access to a general action designator of cutting that can be parameterised. When the robot is given a task request, it can either query the graph database with the knowledge graph directly via its SPARQL REST API or use a knowledge framework with additional functionalities such as the KnowRob knowledge processing system1 and pose Prolog queries, which then are translated to SPARQL queries.