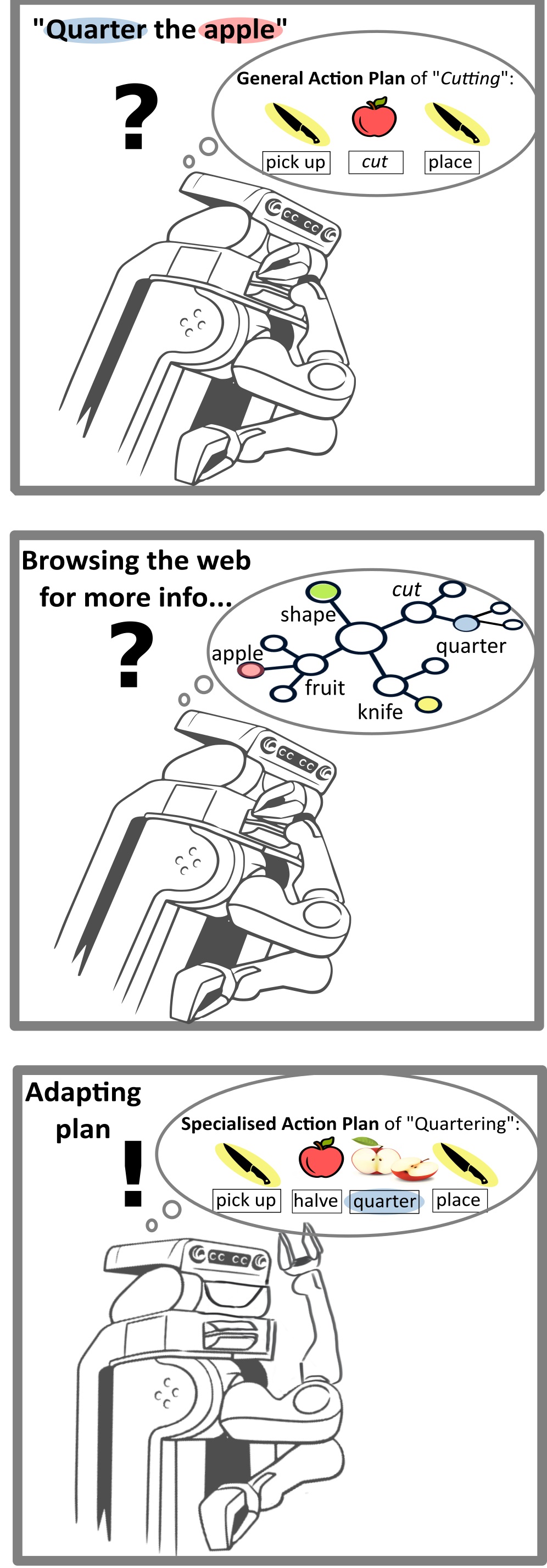
We start tackling this challenge by focusing on selected task domains, starting with cutting. The idea is that our methodology can teach robots to cut any fruit with any to for any purpose, as visualised below. For this, the robot needs to query the knowledge graph to parameterise its general action plan.We want to enable robots to learn everyday manipulation tasks from the Web and thus make abstract knowledge actionable.
Please choose a cutting verb and a food object from the dropdown lists below. Based on a food cutting knowledge graph, a sequence of motions will be returned that a robot can use for action parameterisation.
Show me the plan for the following