Knowledge Acquisition
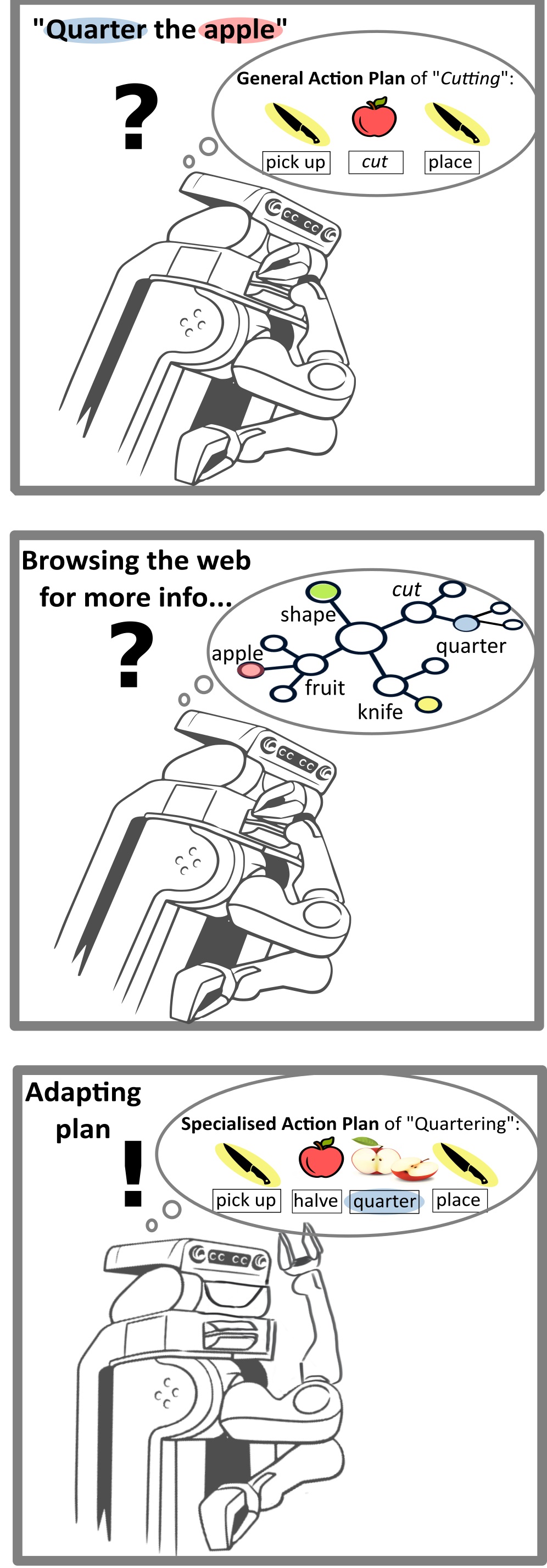
Gathering and Linking Web Knowledge To support robotic agents in executing variations of Cutting on different fruits and vegetables, we collect two types of knowledge in our knowledge graph: action and object knowledge. Both kinds of knowledge need to be linked to enable task execution as explained here.
Action Knowledge The action knowledge covers all properties of a specific manipulation action that are necessary for successfully completing the action and is thus also influenced by the participating objects.