Robot Agent
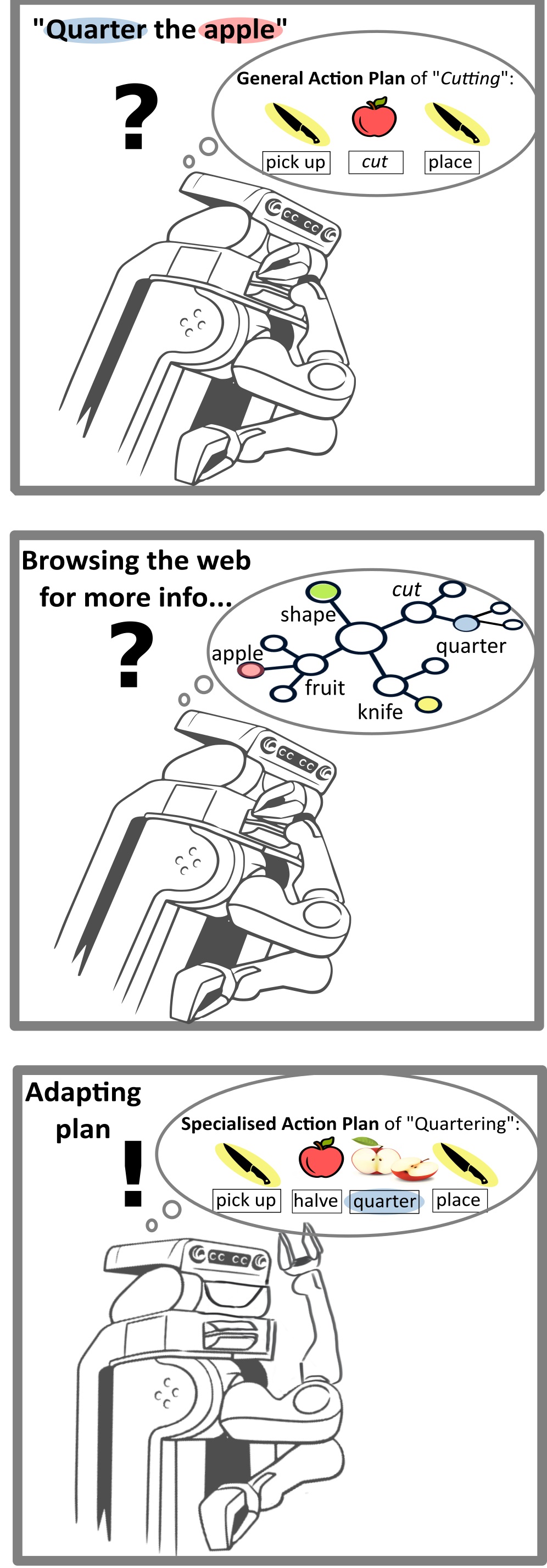
Simulation We want to qualitativly show that a robot using the created ontology can infer the tools and motions needed to perform an unknown task like “Quartering an apple”. To simplify the experiment, we assume some existing knowledge and capabilities:
While not knowing specific terms like “Quartering”, the robot already knows how to cut an object The robot is able to successfully perceive given objects for the experiment: a knife and an apple The robot is also able to grasp and hold a knife and an apple We use a simulation environment inside the Unreal Engine together with tools like URoboSim1 to gain complete control over the environment and precisely manipulate and monitor all factors that will affect the robot’s behaviour.